
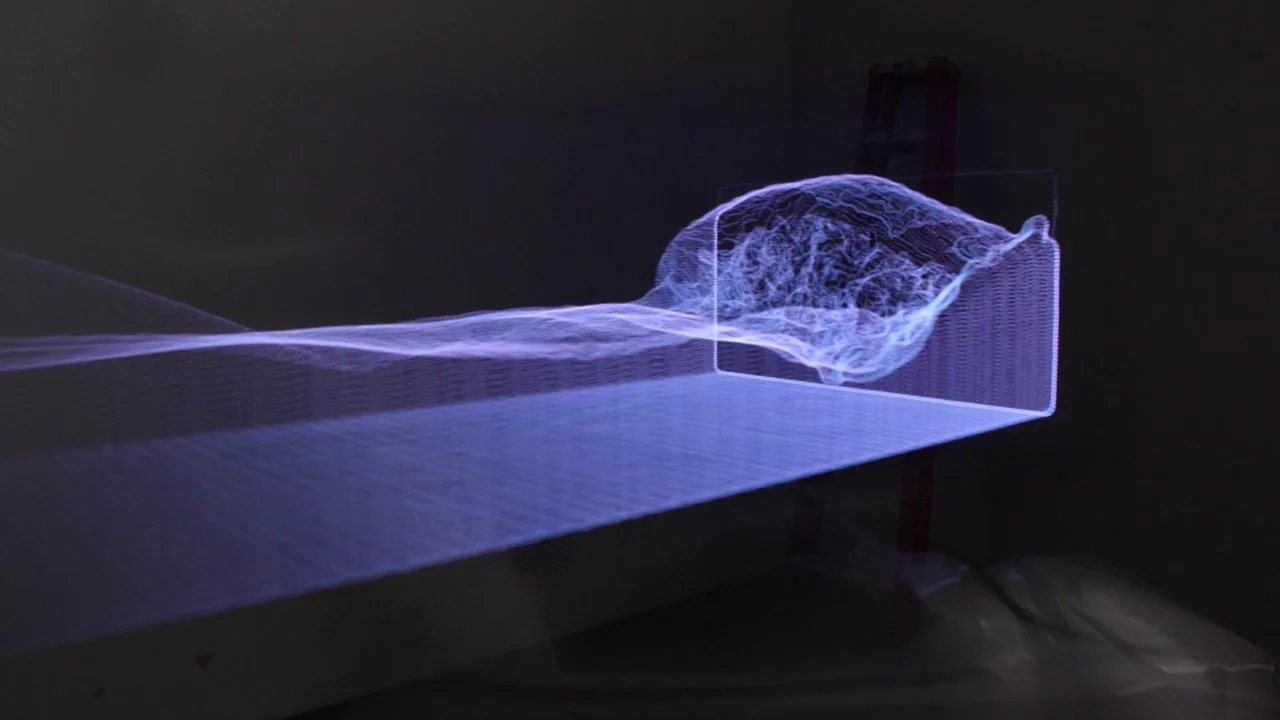



[Videos 1 and 2]
Tomographic exercise using a large flat screen TV mounted to a robot which successively "scans" or slices through each frame of an animation. In this case the animation is a liquid simulation generated in Real Flow. The liquid simulation was chosen to make visible and accentuate the invisible bounding box of the TV moving through space.
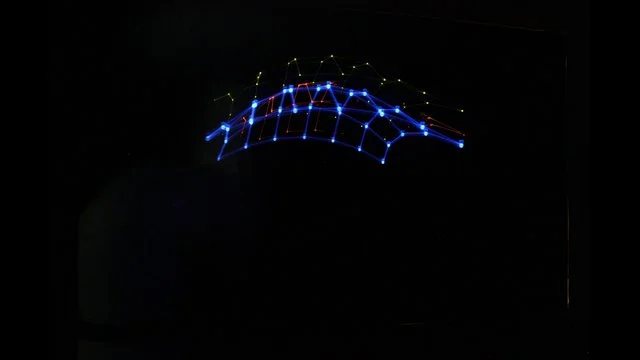
[Videos 3 - 5]
Final videos of a long-exposure light animation technique. The technique involves creating several long exposure shots which represent a single frame of an animation. When the long exposures are compiled (several hundred of them) they create one seamless and complex animation using only 3 LED's (blue, red, yellow).
The process uses Grasshopper to generate a single toolpath, Processing to deal with the LED coordination, Esperant.0 to control the robot and cameras and sync the LED firing, and Kangaroo to provide the physics simulation.
***There is no post processing involved in any of these animations.