




A group project involving the investigation of formal languages of various vehicular precedents. This is an ongoing project, and these are the images, videos, and simulations I’ve created.
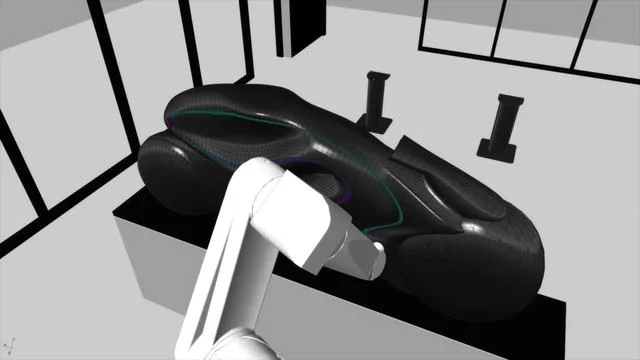
The images below are renderings of a 3d model I made of Luigi Colani’s “Frog” (Motorcycle study of 1973). I created the 3d model in Maya from a profile view and then extracted primary edge curves to generate toolpaths for the robot simulations shown below. Those extracted curves also helped to generate the strips of light shown in the renderings.
We are currently conducting formal investigations to generate new forms to be fabricated. Then our task will be to develop a form of robotic fabrication that lends itself to the forms we have generated.
SCI-Arc Fall 2012
Testa Vertical ESTm Studio
Instructor: Peter Testa / Brandon Kruysman / Jonathan Proto
AT: Peter Vikar
Team: Brian Harms / Haejun Jung / Vince Huang / Yuying Chen