

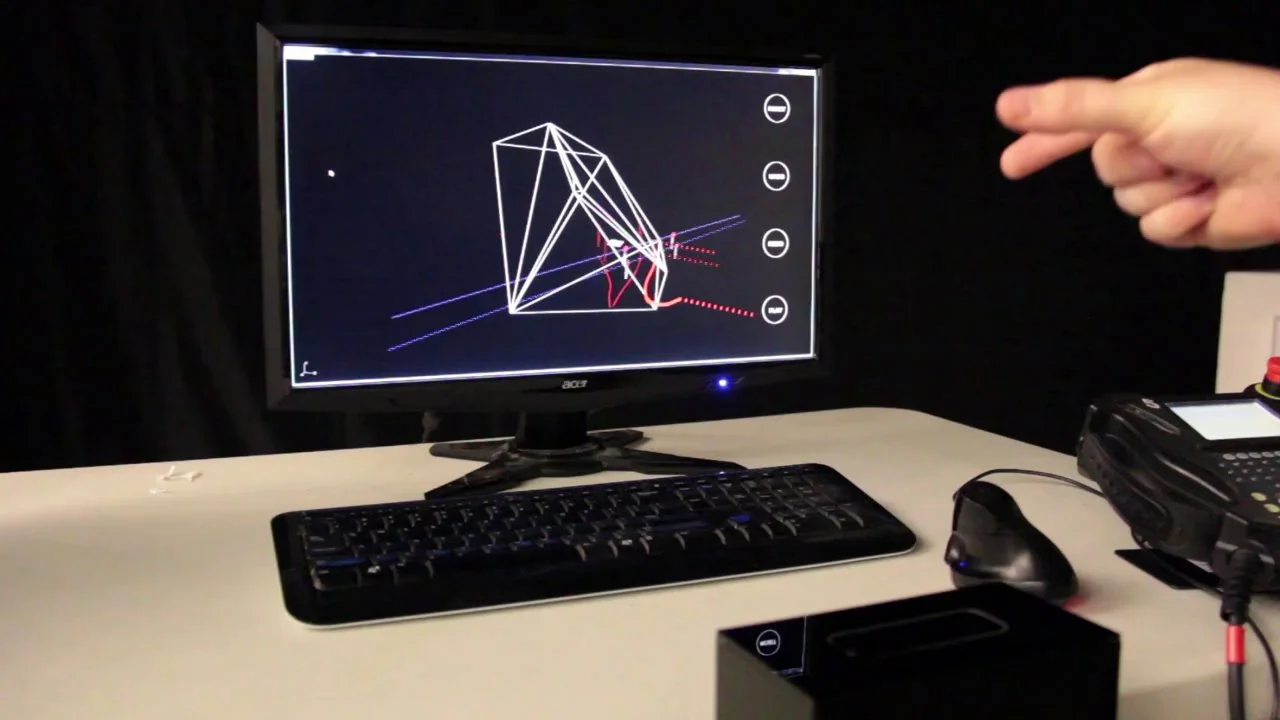
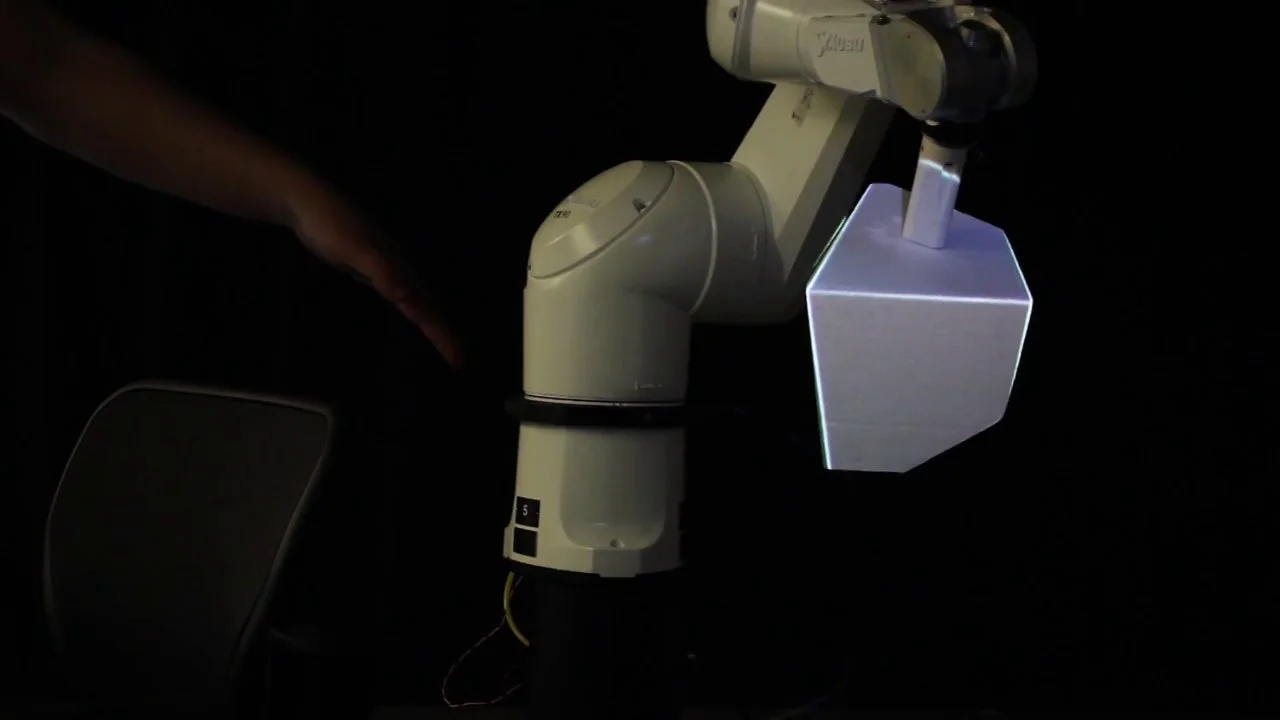
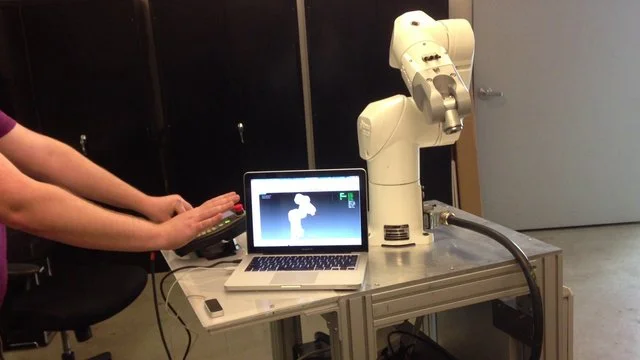
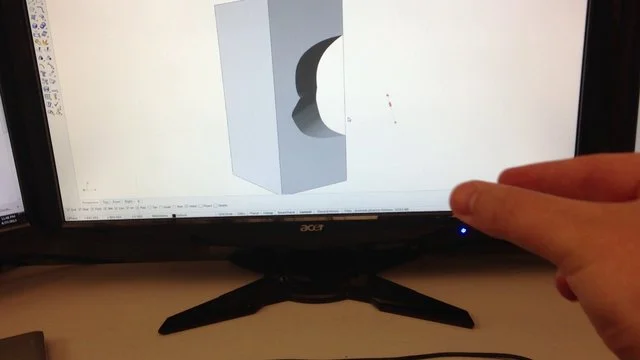

This project is an investigation of the translation of real-time motion data into robotic motion paths. Through the implementation of an intuitive interface (which behind the scenes is comprised of: Leap motion + Rhino + Grasshopper + Firefly + Crane) designers can go straight from fluid hand-motions to freeform physical objects. The goal is to circumnavigate mediation of the input by traditional 2D digital interfaces (mouse, keyboard, monitor), and allow for 3D input to translate directly to 3D output.